Saturday, 27 Jan 2007
Lego Mindstorms NXT: First Impressions
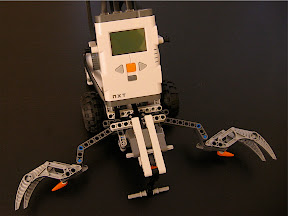
Tribot
|
I just got the new Lego Mindstorms and built the Tribot, after an
impatient two weeks of waiting for it to arrive from buy.com. Here are
some observations after a couple days of tinkering.
The out-of-the-box experience would have been improved if I had
remembered to buy batteries on the way home. (Isn't everything
rechargeable these days?) Also, six AA's is rather inconvenient
because I have a recharger for my camera that takes four.
The box itself is much less useful than the old Lego boxes. The old
ones were divided up bento-box style and had a nice lid, so they were
pretty useful for sorting and storing Legos. This one has a
non-functional marketing lid and everything is in baggies. I'll have
to figure out a better way to store Lego parts rather sooner than I
thought.
It's strange to be working with physical parts after so much time
programming. I got to know the living room floor much better after
losing a couple of pieces. I probably should have vacuumed before
opening the box!
Odd Parts

|
The parts are weird. There are no bricks at all. The only
parts that are the same since when I was a kid (using the old Expert
Builder sets) are some of the gears, axles, and pegs. Everything else
is made out of girders and odd pipe fittings. I wasn't really sure
what most of the parts were good for until after building the model.
The visual programming language used to program the robot is
reasonably convenient for getting started, and it's neat that it's
multithreaded. However, the development environment is clearly a bad
port running under some kind of emulation. The user interface has no
native Mac widgets or even reasonable approximations. On my Intel
iMac, it runs under Rosetta, so it's an emulator on top of an
emulator. There are slow repaints and stopwatches, and it takes about
20 seconds to compile a program whenever sending it to the robot.
Also, Bluetooth support doesn't work on Intel iMacs due to Rosetta.
Learning how to control the claw is a little tricky. You need to set
the power really low or it snaps like an alligator and the model tears
itself apart. (Luckily the claw is kind of wimpy on the Tribot.) I
thought my robot should at least know enough to stop moving its claw
when it hits an obstacle, so I wrote a program that detects when the
motor position stops changing and stops the motor, and that made the
robot seem a little more animal-like.
To do that, I wrote my first "custom block", which is how you write
methods in Mindstorm's language. (The block's purpose was to wait
until a motor's position stops changing.) This was rather annoying to
construct because I had to wire several blocks together, and drawing
wires between blocks is rather finicky, especially with the slow
screen refreshes. The way you create a block is essentially the
"extract method" refactoring, but unfortunately that's the only tool
you have and you can't edit a custom block's inputs once you've
created it. It seems a bit much to write a simple loop. Maybe it's
time to start exploring the other programming environments.
respond | link |
/misc
|
